




逆天 哥大华裔学生开发人脸机器人 表情超逼真(图)
(1 和 2) 用磁铁连接的连杆控制眉毛。(3) 上眼睑。(4) 下眼睑。(5) 眼球连杆。(6) 眼球框架。(7) 相机

(8 至 10 和 13) 口形被动连杆机构。(11 和 12) 二维五杆机制(2D five-bar mechanism)的连杆。
Emo 设计的主要区别之一是使用直接连接的磁铁来使可更换的面部皮肤变形。这种方法可以更精确地控制面部表情。
此外,Emo 的眼睛内嵌摄像头,可实现仿人视觉感知。
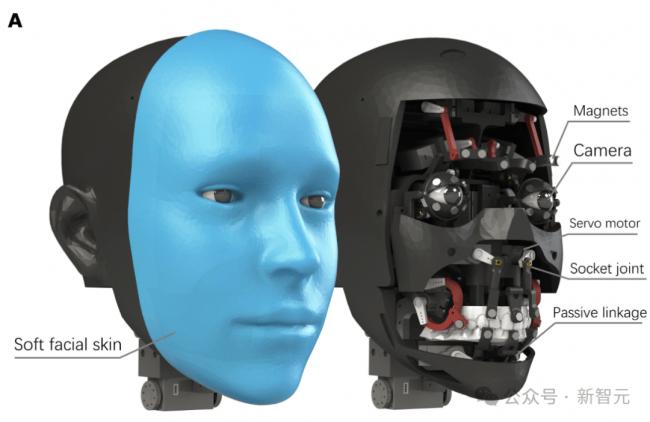
这些高分辨率的 RGB(红、绿、蓝)摄像头,每只眼睛的瞳孔内都有一个,增强了机器人与环境互动的能力,并能更好地预测对话者的面部表情。
眼睛模块控制眼球、眉毛和眼睑的运动,如上图所示。
每个眼框都装有一个高分辨率 RGB 摄像头。眼框分别由两个电机通过平行四边形机构在俯仰和偏航两个轴上驱动。
这种设计的优点是在眼框中央创造了更多空间,使研究人员能够将摄像头模块安装在与人类瞳孔相对应的自然位置。
这种设计有利于机器人与人类进行更自然的面对面互动。
它还能实现正确自然的注视,这是近距离非语言交流的一个关键元素。
除了这些硬件升级外,研究人员还引入了一个由两个神经网络组成的学习框架 ―― 一个用于预测 Emo 自身的面部表情(自我模型),另一个用于预测对话者的面部表情(对话者模型)。
研究人员的软皮人脸机器人有 23 个专用于控制面部表情的电机和 3 个用于颈部运动的电机。
整个面部皮肤由硅胶制成,并用 30 块磁铁固定在机器人面部之上。
机器人面部皮肤可以更换成其他设计,以获得不同的外观和皮肤材质。

[加西网正招聘多名全职sales 待遇优]
无评论不新闻,发表一下您的意见吧
(8 至 10 和 13) 口形被动连杆机构。(11 和 12) 二维五杆机制(2D five-bar mechanism)的连杆。
Emo 设计的主要区别之一是使用直接连接的磁铁来使可更换的面部皮肤变形。这种方法可以更精确地控制面部表情。
此外,Emo 的眼睛内嵌摄像头,可实现仿人视觉感知。
这些高分辨率的 RGB(红、绿、蓝)摄像头,每只眼睛的瞳孔内都有一个,增强了机器人与环境互动的能力,并能更好地预测对话者的面部表情。
眼睛模块控制眼球、眉毛和眼睑的运动,如上图所示。
每个眼框都装有一个高分辨率 RGB 摄像头。眼框分别由两个电机通过平行四边形机构在俯仰和偏航两个轴上驱动。
这种设计的优点是在眼框中央创造了更多空间,使研究人员能够将摄像头模块安装在与人类瞳孔相对应的自然位置。
这种设计有利于机器人与人类进行更自然的面对面互动。
它还能实现正确自然的注视,这是近距离非语言交流的一个关键元素。
除了这些硬件升级外,研究人员还引入了一个由两个神经网络组成的学习框架 ―― 一个用于预测 Emo 自身的面部表情(自我模型),另一个用于预测对话者的面部表情(对话者模型)。
研究人员的软皮人脸机器人有 23 个专用于控制面部表情的电机和 3 个用于颈部运动的电机。
整个面部皮肤由硅胶制成,并用 30 块磁铁固定在机器人面部之上。
机器人面部皮肤可以更换成其他设计,以获得不同的外观和皮肤材质。
[加西网正招聘多名全职sales 待遇优]
| 分享: |
| 注: | 在此页阅读全文 |
推荐: