




[”°ґ»] ”°ґ»є§»Ћо^ічФzѕсо^ яЕітє§яЕљћЩC∆ч»ЋУМ„‘ЉЇпИЌл
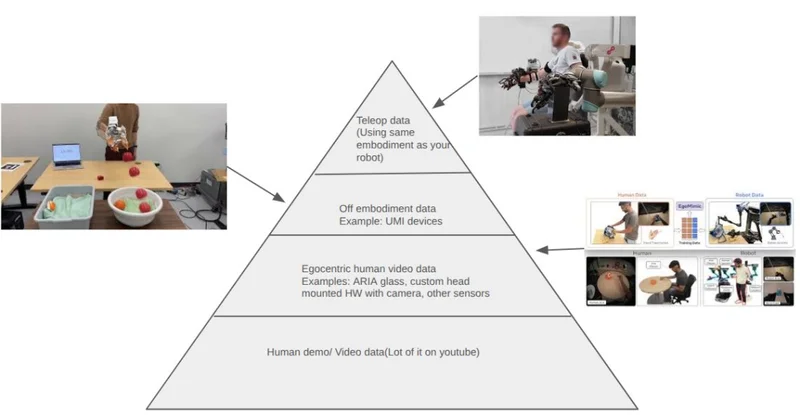
ЩC∆ч»ЋµƒФµУюјІЊ≥”–ґа’FПИƒЎ£њ”–ВАФµ„÷њ…“‘Є– №“Љѕ¬°£ƒњ«∞ЩC∆ч»ЋоI”то^≤њй_‘іФµУюЉѓ OpenX-Embodiment£ђЕRЊџЅЋ»Ђ«т 22 ЈN≤їЌђЩC∆ч»Ћ±Њуw°Ґ311 ВАИцЊ∞ѕ¬µƒ 100 »fЧl≤ў„ч№ЙџE°£¬†∆рБнЌ¶Й—”^£ђµЂіу’Z—‘ƒ£–Ќµƒ”ЦЊЪФµУюД”Ёm»fГ| token£ђЇЌ 100 »fЈ≈‘Џ“Љ∆р£ђ≤оЅЋ’ы’ыЅщВАФµЅњЉЙ°£
’жЩCяb≤ўяА”–ЅнЌв“ЉВА¬йЯ©£ђФµУюЇЌ”≤ЉюПКљЙґ®°£
я^»•іуґаФµ≤ў„чФµУю£ђґЉ «”√ћЎґ®–ЌћЦµƒЩC∆ч»Ћ≤…Љѓµƒ°£A –ЌЩC–µ±џµƒФµУю£ђЇ№лy÷±љ”ƒ√»•”ЦЊЪ B –ЌЩC–µ±џ°£ЩC–µ±џµƒкPєЭљYШЛ≤їЌђ°Ґƒ©ґЋКA„¶µƒ–ќ†о≤їЌђ°ҐФzѕсо^µƒќї÷√≤їЌђ£ђЌђШ”µƒ"ƒ√∆р±≠„”"я@ВАД”„ч£ђ‘ЏГ…ЈNЩC∆ч»Ћ…н…ѕМ¶С™µƒя\Д”№ЙџEњ…“‘Ќк»Ђ≤ї“ЉШ”°£УQ“Љњо”≤Љю£ђФµУюЊЌµ√÷Ў–¬≤…£ђµ»мґ√њіќ…эЉЙ”≤Љю£ђґЉ“™їЎµљ‘≠ьc÷Ў–¬й_ Љ°£
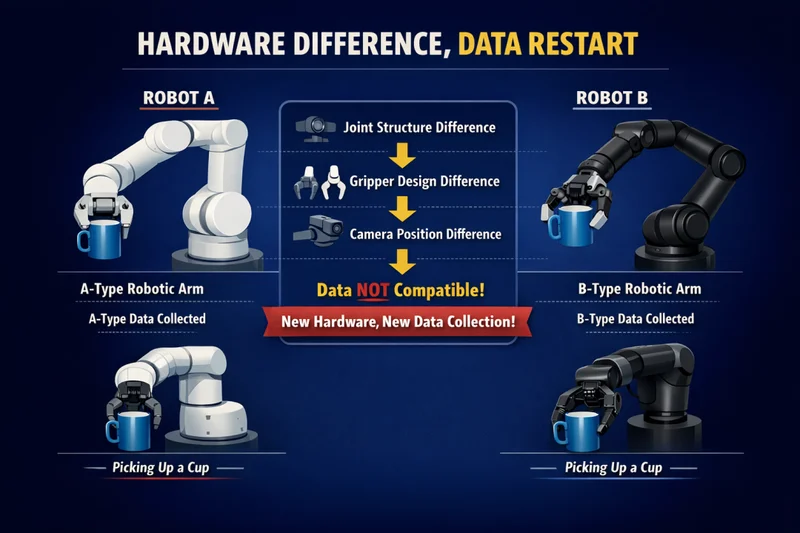
“™іт∆∆я@ВАљ©Њ÷£ђЊЌ–и“™∞—ФµУюЇЌЩC∆чљвљЙ°£±»»з≤ї“јўЗћЎґ®–ЌћЦµƒЩC∆ч»Ћ£ђ÷±љ”Пƒ»Ћ…н…ѕ≤…Љѓ≤ў„чФµУю°™°™Яo±ЊуwФµУю°£
“тЮй»ЋоР„ц°∞ƒ√∆р±≠„”°±я@ВАД”„ч£ђ∆д ÷≤њ№ЙџE£®ќї÷√°Ґ„ЋСB£© «ѕаМ¶мґ јљз„шШЋѕµїт„‘…н№|О÷µƒ£ђњ…“‘Ќ®я^я\Д”МW”≥…дёDУQµљ≤їЌђО„Їќ≥яізЇЌкPєЭ≈д÷√µƒЩC–µ±џ…ѕ°£ФµУю≤…“Љіќ£ђњ…“‘ЈіПЌ”√‘Џ≤їЌђ”≤Љю…ѕ°£
Єь÷Ў“™µƒ «£ђя@ЈN≤…ЉѓЈљ љ≥…±Њ„гЙтµЌ£ђњ…“‘ЁpЋ…Є≤…wіуЅњ≤їЌђµƒ’жМНИцЊ∞°£—–Њњ»ЋЖT„ця^Ьy‘З£ђЌђШ”ФµЅњµƒФµУю£ђЈ÷≤Љ‘Џ 32 ВА≤їЌђ≠hЊ≥°Ґ√њВА≠hЊ≥Єч 50 Чl£ђ±»»Ђ≤њЉѓ÷–‘Џ“ЉВА≠hЊ≥µƒ 1600 Чl£ђ”ЦЊЪ≥цБнµƒƒ£–ЌЈЇїѓƒ№Ѕ¶ПКµ√ґа°£
ЩC∆ч»Ћ–и“™“Кя^„гЙтґа"≤ї“ЉШ”µƒ јљз"£ђ≤≈ƒ№‘Џ“ЉВАПƒЫ]“Кя^µƒ–¬ИцЊ∞—e≤її≈≤їБy°£я@“≤ «Юй…ґ Ego ФµУюЈљ∞Єя@ьNПК’{“™‘Џ’жМНИцЊ∞—e≤…Љѓ°£≤їЌђµƒє§ПS°Ґ≤їЌђµƒ≤ў„чћ®°Ґ≤їЌђµƒє§»Ћ£ђ√њ“ЉВАЉЪќҐµƒ≤оЃР£ђМ¶ƒ£–ЌБн’fґЉ «рBЈ÷°£

љсƒк4‘¬£ђGeneralist ∞l≤Љ GEN-1°£я@њоƒ£–Ќ”√ 50 »f–°Хr»ЋоР≤ў„ч“Хоl”ЦЊЪґш≥…£ђ–ІєыѕаЃФу@»Ћ£Ї‘Џ’џЉИѕд°Ґ ÷ЩC—bЇ–µ»»ќД’…ѕ£ђ∆љЊщ≥…є¶¬ Пƒ 64% ÷±љ”ј≠µљ 99%£ђЋўґ»“≤±»…ѕ“Љіъћб…эЅЋ»ю±ґ°£
[Љ”ќчЊW’э’–∆Єґа√ы»Ђ¬Ъsales іэ”цГЮ]
| Ј÷ѕн: |
| „Ґ£Ї | ‘ЏіЋнУйЖ„x»Ђќƒ |
| —”…мйЖ„x | Єьґа... |
Ќ∆Ћ]: