




[сRЋєњЋ] іу ÷єP!сRЋєњЋЮйЅЋ“ЉЉЇЋљјы яА «‘мЄ£»Ђ»ЋоР?
∆р≥хµƒ“ОДtЋгЈ®£ђ «ЗL‘З„МЁo÷ъс{сВѕµљyјнљв»ЋоР јљзя\––µƒяЙЁЛ£ђБKЗјЄсИћ––°£
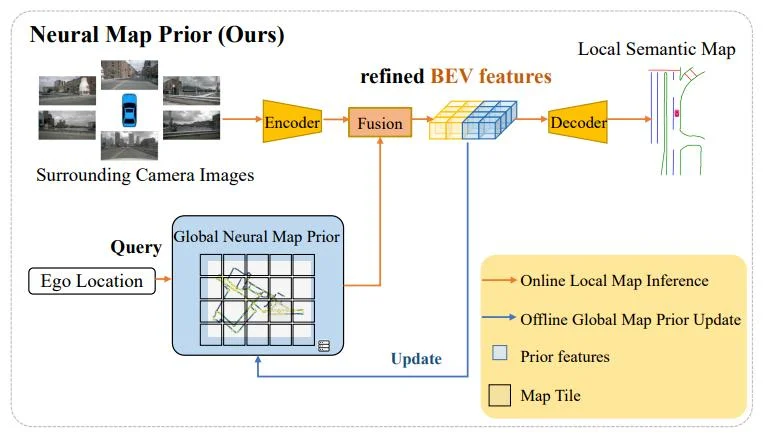
»зєыјнљв”–јІлy£ђЊЌЉ”…ѕBEV°∞шBоЂИD°±°ҐOccupancy°∞2DёD3D°±°ҐЄяЊЂґ»µЎИDµ»ЄчЈNЉЉ–g£ђ≈д…ѕЉ§євј„я_ЇЌЇЅ√„≤®ј„я_µƒ3DьcлЕФµУю£ђѕ»„МЋьњі«ея@ВА јљз°£
µЂ“ОДtЋгЈ®£ђЫ]ёkЈ®ЄF≈eЋщ”–µƒШOґЋ∞Єјэ£ђБK∞—я@–©МСяMѕµљy—e°£ЋгЈ®‘љПЌлs£ђМ¶ЋгЅ¶µƒ“™«уЊЌ‘љЄя£ї”цµљЫ]“Кя^µƒИцЊ∞£ђяАХюЌї»їг¬±∆°Ґгґ‘Џ‘≠µЎ°£
Ћщ“‘£ђ≤≈≥цђFЅЋґЋµљґЋЋгЈ®ЇЌVLMіуƒ£–Ќ°£
‘Џя@“ЉлAґќ£ђЁo÷ъс{сВѕµљyХю”^≤м»ЋоРЋЊЩC£ђƒ£Ј¬МWЅХЋыВГ‘Џ”цµљћЎ в«йЫrѕ¬µƒ≤ў„ч£ђЌђХr‘Џ√њВАХrйgьc”√»ЋоР’Z—‘љвбМ°∞”цµљЅЋ ≤ьN«йЫr°ҐЮй ≤ьN“™я@ьN„ц°±°£
я@ЊЌ”–ьcѕс≥…«І…ѕ»fВАјѕЋЊЩC ÷∞— ÷ОІЌђ“ЉВАЌљµ№£ђ ¬ббяАХюПЌ±P°ҐЈіЋЉ°Ґ’ыЄƒ£ђМWµ√Ј«≥£њм°£
»їґш±„ґЋ «£ђ…нЮй°∞јѕЋЊЩCЇѕЉѓ°±µƒЋьХюј^≥–»ЋоРЋЊЩCµƒЙƒЅХСT£ђ“≤Ы]”–’ж’эјнљв±≥ббµƒќпјн јљзЇЌљї“Оµƒ∞≤»Ђ‘≠Дt°£
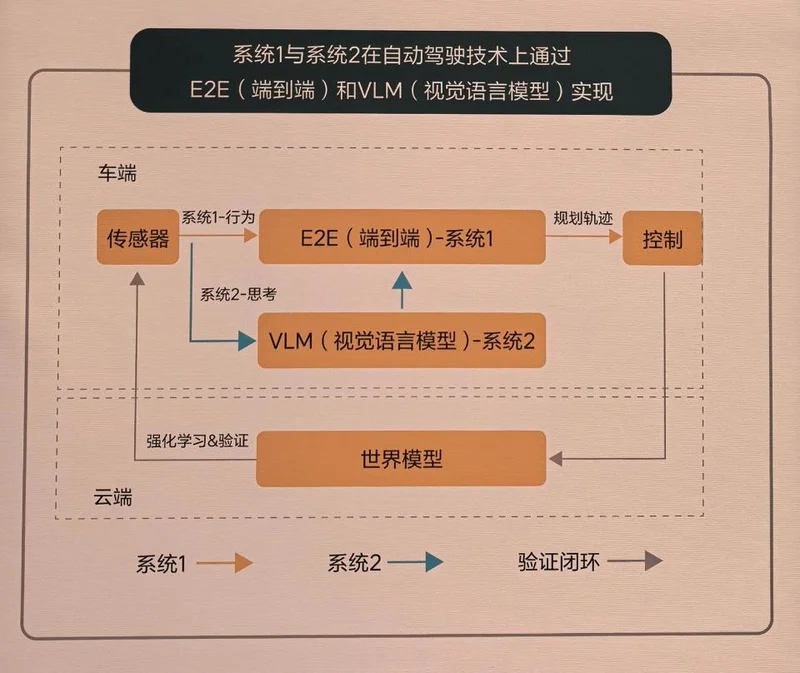
мґ «£ђVLAіуƒ£–ЌЇЌ јљзƒ£–ЌЩMњ’≥ц ј£ђ„МПКїѓМWЅХ≥…ЅЋШIљзєЂ’Jµƒ÷чЅчЈљ∞Є°£
ПƒМWЅХ»ЋоР‘хьNй_№З°Ґµљ„‘ЉЇћљЋч‘хьNй_№З°≠°≠÷ї“™ФµУюЙтґа°Ґƒ£ФM≥цµƒИцЊ∞Йтґа£ђЁo÷ъс{сВѕµљyЊЌƒ№‘Џ≤їФаµƒ‘Зеe÷–£ђ’“µљяmЇѕµƒ„оГЮљв°£
µЂЋьµƒћмї®∞е£ђ„оґа÷ї «°∞„оПКјѕЋЊЩC°±°£Њалx’ж’эµƒ„‘Д”с{сВ£ђ“ј»ї”–Ї№йLµƒ¬Ј“™„я°£
“™ѕл„цµљL4£ђ≤ї÷ї «°∞ЊяВд„‘Д”с{сВƒ№Ѕ¶°±£ђяА“™Ѕф≥цЄьґаµƒ»я”а‘O”Л°ҐтЮ„C∞≤»Ђ–‘ЇЌњ…њњ–‘£ђяА–и“™Ќ®я^“ЉѕµЅ–Ј®“ОµƒњЉЇЋ°£

‘Џ≤їЊ√µƒМҐБн£ђ“Љґ®Хю”––¬“ЉіъµƒЉЉ–g≥цђF£ђЌ∆Д”Ёo÷ъс{сВяM“Љ≤љѕт„‘Д”с{сВ∞l’є°£
÷Ѕмґя@іќµƒоIо^—тяАХю≤їХю «ћЎЋєј≠£њ
ƒ«ЊЌ“™њі÷–Зш∆Ј≈∆µƒяM≤љЋўґ»£ђЙт≤їЙтњмЅЋ°£
я@Љ“„оЇ√£°є… –й_СфЈ÷≈ъўI»ліу±Pє…÷Єїщљр
[Љ”ќчЊW’э’–∆Єґа√ы»Ђ¬Ъsales іэ”цГЮ]
Яo‘u’У≤ї–¬¬Д£ђ∞l±н“Љѕ¬ƒъµƒ“в“К∞…
»зєыјнљв”–јІлy£ђЊЌЉ”…ѕBEV°∞шBоЂИD°±°ҐOccupancy°∞2DёD3D°±°ҐЄяЊЂґ»µЎИDµ»ЄчЈNЉЉ–g£ђ≈д…ѕЉ§євј„я_ЇЌЇЅ√„≤®ј„я_µƒ3DьcлЕФµУю£ђѕ»„МЋьњі«ея@ВА јљз°£
µЂ“ОДtЋгЈ®£ђЫ]ёkЈ®ЄF≈eЋщ”–µƒШOґЋ∞Єјэ£ђБK∞—я@–©МСяMѕµљy—e°£ЋгЈ®‘љПЌлs£ђМ¶ЋгЅ¶µƒ“™«уЊЌ‘љЄя£ї”цµљЫ]“Кя^µƒИцЊ∞£ђяАХюЌї»їг¬±∆°Ґгґ‘Џ‘≠µЎ°£
Ћщ“‘£ђ≤≈≥цђFЅЋґЋµљґЋЋгЈ®ЇЌVLMіуƒ£–Ќ°£
‘Џя@“ЉлAґќ£ђЁo÷ъс{сВѕµљyХю”^≤м»ЋоРЋЊЩC£ђƒ£Ј¬МWЅХЋыВГ‘Џ”цµљћЎ в«йЫrѕ¬µƒ≤ў„ч£ђЌђХr‘Џ√њВАХrйgьc”√»ЋоР’Z—‘љвбМ°∞”цµљЅЋ ≤ьN«йЫr°ҐЮй ≤ьN“™я@ьN„ц°±°£
я@ЊЌ”–ьcѕс≥…«І…ѕ»fВАјѕЋЊЩC ÷∞— ÷ОІЌђ“ЉВАЌљµ№£ђ ¬ббяАХюПЌ±P°ҐЈіЋЉ°Ґ’ыЄƒ£ђМWµ√Ј«≥£њм°£
»їґш±„ґЋ «£ђ…нЮй°∞јѕЋЊЩCЇѕЉѓ°±µƒЋьХюј^≥–»ЋоРЋЊЩCµƒЙƒЅХСT£ђ“≤Ы]”–’ж’эјнљв±≥ббµƒќпјн јљзЇЌљї“Оµƒ∞≤»Ђ‘≠Дt°£
мґ «£ђVLAіуƒ£–ЌЇЌ јљзƒ£–ЌЩMњ’≥ц ј£ђ„МПКїѓМWЅХ≥…ЅЋШIљзєЂ’Jµƒ÷чЅчЈљ∞Є°£
ПƒМWЅХ»ЋоР‘хьNй_№З°Ґµљ„‘ЉЇћљЋч‘хьNй_№З°≠°≠÷ї“™ФµУюЙтґа°Ґƒ£ФM≥цµƒИцЊ∞Йтґа£ђЁo÷ъс{сВѕµљyЊЌƒ№‘Џ≤їФаµƒ‘Зеe÷–£ђ’“µљяmЇѕµƒ„оГЮљв°£
µЂЋьµƒћмї®∞е£ђ„оґа÷ї «°∞„оПКјѕЋЊЩC°±°£Њалx’ж’эµƒ„‘Д”с{сВ£ђ“ј»ї”–Ї№йLµƒ¬Ј“™„я°£
“™ѕл„цµљL4£ђ≤ї÷ї «°∞ЊяВд„‘Д”с{сВƒ№Ѕ¶°±£ђяА“™Ѕф≥цЄьґаµƒ»я”а‘O”Л°ҐтЮ„C∞≤»Ђ–‘ЇЌњ…њњ–‘£ђяА–и“™Ќ®я^“ЉѕµЅ–Ј®“ОµƒњЉЇЋ°£
‘Џ≤їЊ√µƒМҐБн£ђ“Љґ®Хю”––¬“ЉіъµƒЉЉ–g≥цђF£ђЌ∆Д”Ёo÷ъс{сВяM“Љ≤љѕт„‘Д”с{сВ∞l’є°£
÷Ѕмґя@іќµƒоIо^—тяАХю≤їХю «ћЎЋєј≠£њ
ƒ«ЊЌ“™њі÷–Зш∆Ј≈∆µƒяM≤љЋўґ»£ђЙт≤їЙтњмЅЋ°£
я@Љ“„оЇ√£°є… –й_СфЈ÷≈ъўI»ліу±Pє…÷Єїщљр
[Љ”ќчЊW’э’–∆Єґа√ы»Ђ¬Ъsales іэ”цГЮ]
| Ј÷ѕн: |
| „Ґ£Ї | ‘ЏіЋнУйЖ„x»Ђќƒ |
| —”…мйЖ„x | Єьґа... |
Ќ∆Ћ]: