




[ТэЫЙПЫ] ДѓЪжБЪ!ТэЫЙПЫЮЊСЫвЛМКЫНРћ ЛЙЪЧдьИЃШЋШЫРр?
Ц№ГѕЕФЙцдђЫуЗЈЃЌЪЧГЂЪдШУИЈжњМнЪЛЯЕЭГРэНтШЫРрЪРНчдЫааЕФТпМЃЌВЂбЯИёжДааЁЃ
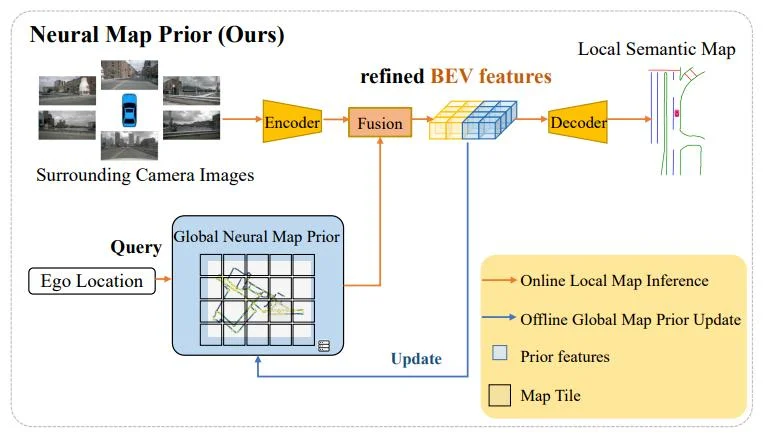
ШчЙћРэНтгаРЇФбЃЌОЭМгЩЯBEVЁАФёюЋЭМЁБЁЂOccupancyЁА2DзЊ3DЁБЁЂИпОЋЖШЕиЭМЕШИїжжММЪѕЃЌХфЩЯМЄЙтРзДяКЭКСУзВЈРзДяЕФ3DЕудЦЪ§ОнЃЌЯШШУЫќПДЧхетИіЪРНчЁЃ
ЕЋЙцдђЫуЗЈЃЌУЛАьЗЈЧюОйЫљгаЕФМЋЖЫАИР§ЃЌВЂАбетаЉаДНјЯЕЭГРяЁЃЫуЗЈдНИДдгЃЌЖдЫуСІЕФвЊЧѓОЭдНИпЃЛгіЕНУЛМћЙ§ЕФГЁОАЃЌЛЙЛсЭЛШЛуТБЦЁЂуЖдкдЕиЁЃ
ЫљвдЃЌВХГіЯжСЫЖЫЕНЖЫЫуЗЈКЭVLMДѓФЃаЭЁЃ
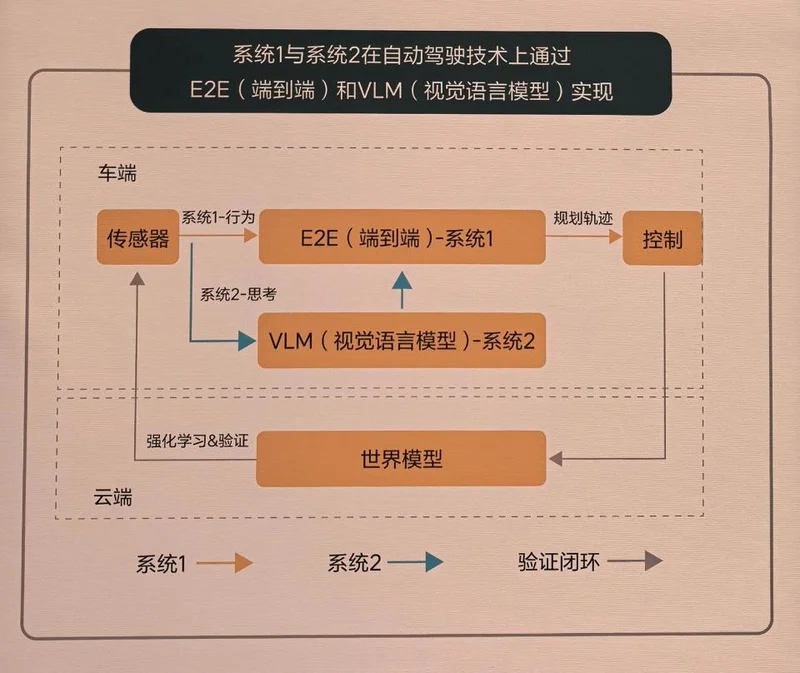
дкетвЛНзЖЮЃЌИЈжњМнЪЛЯЕЭГЛсЙлВьШЫРрЫОЛњЃЌФЃЗТбЇЯАЫћУЧдкгіЕНЬиЪтЧщПіЯТЕФВйзїЃЌЭЌЪБдкУПИіЪБМфЕугУШЫРргябдНтЪЭЁАгіЕНСЫЪВУДЧщПіЁЂЮЊЪВУДвЊетУДзіЁБЁЃ
етОЭгаЕуЯёГЩЧЇЩЯЭђИіРЯЫОЛњЪжАбЪжДјЭЌвЛИіЭНЕмЃЌЪТКѓЛЙЛсИДХЬЁЂЗДЫМЁЂећИФЃЌбЇЕУЗЧГЃПьЁЃ
ШЛЖјБзЖЫЪЧЃЌЩэЮЊЁАРЯЫОЛњКЯМЏЁБЕФЫќЛсМЬГаШЫРрЫОЛњЕФЛЕЯАЙпЃЌвВУЛгаеце§РэНтБГКѓЕФЮяРэЪРНчКЭНЛЙцЕФАВШЋддђЁЃ
гкЪЧЃЌVLAДѓФЃаЭКЭЪРНчФЃаЭКсПеГіЪРЃЌШУЧПЛЏбЇЯАГЩСЫвЕНчЙЋШЯЕФжїСїЗНАИЁЃ
ДгбЇЯАШЫРрдѕУДПЊГЕЁЂЕНздМКЬНЫїдѕУДПЊГЕЁЁжЛвЊЪ§ОнЙЛЖрЁЂФЃФтГіЕФГЁОАЙЛЖрЃЌИЈжњМнЪЛЯЕЭГОЭФмдкВЛЖЯЕФЪдДэжаЃЌевЕНЪЪКЯЕФзюгХНтЁЃ
ЕЋЫќЕФЬьЛЈАхЃЌзюЖржЛЪЧЁАзюЧПРЯЫОЛњЁБЁЃОрРыеце§ЕФздЖЏМнЪЛЃЌвРШЛгаКмГЄЕФТЗвЊзпЁЃ
вЊЯызіЕНL4ЃЌВЛжЛЪЧЁАОпБИздЖЏМнЪЛФмСІЁБЃЌЛЙвЊСєГіИќЖрЕФШпгрЩшМЦЁЂбщжЄАВШЋадКЭПЩППадЃЌЛЙашвЊЭЈЙ§вЛЯЕСаЗЈЙцЕФПМКЫЁЃ

дкВЛОУЕФНЋРДЃЌвЛЖЈЛсгааТвЛДњЕФММЪѕГіЯжЃЌЭЦЖЏИЈжњМнЪЛНјвЛВНЯђздЖЏМнЪЛЗЂеЙЁЃ
жСгкетДЮЕФСьЭЗбђЛЙЛсВЛЛсЪЧЬиЫЙРЃП
ФЧОЭвЊПДжаЙњЦЗХЦЕФНјВНЫйЖШЃЌЙЛВЛЙЛПьСЫЁЃ
етМвзюКУЃЁЙЩЪаПЊЛЇЗжХњТђШыДѓХЬЙЩжИЛљН№
[МгЮїЭје§еаЦИЖрУћШЋжАsales Д§гігХ]
ЮоЦРТлВЛаТЮХЃЌЗЂБэвЛЯТФњЕФвтМћАЩ
ШчЙћРэНтгаРЇФбЃЌОЭМгЩЯBEVЁАФёюЋЭМЁБЁЂOccupancyЁА2DзЊ3DЁБЁЂИпОЋЖШЕиЭМЕШИїжжММЪѕЃЌХфЩЯМЄЙтРзДяКЭКСУзВЈРзДяЕФ3DЕудЦЪ§ОнЃЌЯШШУЫќПДЧхетИіЪРНчЁЃ
ЕЋЙцдђЫуЗЈЃЌУЛАьЗЈЧюОйЫљгаЕФМЋЖЫАИР§ЃЌВЂАбетаЉаДНјЯЕЭГРяЁЃЫуЗЈдНИДдгЃЌЖдЫуСІЕФвЊЧѓОЭдНИпЃЛгіЕНУЛМћЙ§ЕФГЁОАЃЌЛЙЛсЭЛШЛуТБЦЁЂуЖдкдЕиЁЃ
ЫљвдЃЌВХГіЯжСЫЖЫЕНЖЫЫуЗЈКЭVLMДѓФЃаЭЁЃ
дкетвЛНзЖЮЃЌИЈжњМнЪЛЯЕЭГЛсЙлВьШЫРрЫОЛњЃЌФЃЗТбЇЯАЫћУЧдкгіЕНЬиЪтЧщПіЯТЕФВйзїЃЌЭЌЪБдкУПИіЪБМфЕугУШЫРргябдНтЪЭЁАгіЕНСЫЪВУДЧщПіЁЂЮЊЪВУДвЊетУДзіЁБЁЃ
етОЭгаЕуЯёГЩЧЇЩЯЭђИіРЯЫОЛњЪжАбЪжДјЭЌвЛИіЭНЕмЃЌЪТКѓЛЙЛсИДХЬЁЂЗДЫМЁЂећИФЃЌбЇЕУЗЧГЃПьЁЃ
ШЛЖјБзЖЫЪЧЃЌЩэЮЊЁАРЯЫОЛњКЯМЏЁБЕФЫќЛсМЬГаШЫРрЫОЛњЕФЛЕЯАЙпЃЌвВУЛгаеце§РэНтБГКѓЕФЮяРэЪРНчКЭНЛЙцЕФАВШЋддђЁЃ
гкЪЧЃЌVLAДѓФЃаЭКЭЪРНчФЃаЭКсПеГіЪРЃЌШУЧПЛЏбЇЯАГЩСЫвЕНчЙЋШЯЕФжїСїЗНАИЁЃ
ДгбЇЯАШЫРрдѕУДПЊГЕЁЂЕНздМКЬНЫїдѕУДПЊГЕЁЁжЛвЊЪ§ОнЙЛЖрЁЂФЃФтГіЕФГЁОАЙЛЖрЃЌИЈжњМнЪЛЯЕЭГОЭФмдкВЛЖЯЕФЪдДэжаЃЌевЕНЪЪКЯЕФзюгХНтЁЃ
ЕЋЫќЕФЬьЛЈАхЃЌзюЖржЛЪЧЁАзюЧПРЯЫОЛњЁБЁЃОрРыеце§ЕФздЖЏМнЪЛЃЌвРШЛгаКмГЄЕФТЗвЊзпЁЃ
вЊЯызіЕНL4ЃЌВЛжЛЪЧЁАОпБИздЖЏМнЪЛФмСІЁБЃЌЛЙвЊСєГіИќЖрЕФШпгрЩшМЦЁЂбщжЄАВШЋадКЭПЩППадЃЌЛЙашвЊЭЈЙ§вЛЯЕСаЗЈЙцЕФПМКЫЁЃ
дкВЛОУЕФНЋРДЃЌвЛЖЈЛсгааТвЛДњЕФММЪѕГіЯжЃЌЭЦЖЏИЈжњМнЪЛНјвЛВНЯђздЖЏМнЪЛЗЂеЙЁЃ
жСгкетДЮЕФСьЭЗбђЛЙЛсВЛЛсЪЧЬиЫЙРЃП
ФЧОЭвЊПДжаЙњЦЗХЦЕФНјВНЫйЖШЃЌЙЛВЛЙЛПьСЫЁЃ
етМвзюКУЃЁЙЩЪаПЊЛЇЗжХњТђШыДѓХЬЙЩжИЛљН№
[МгЮїЭје§еаЦИЖрУћШЋжАsales Д§гігХ]
| ЗжЯэ: |
| зЂЃК | дкДЫвГдФЖСШЋЮФ |
| бгЩьдФЖС | ИќЖр... |
ЭЦМі: