
新闻  "盲眼"机器人30秒跑酷首秀惊艳 华人学者领衔
"盲眼"机器人30秒跑酷首秀惊艳 华人学者领衔
"盲眼"机器人30秒跑酷首秀惊艳 华人学者领衔
接下来就让我们具体来看。

首先,OmniRetarget通过基于交互网格(interaction-mesh)的约束优化,将人类示范动作映射到机器人上。
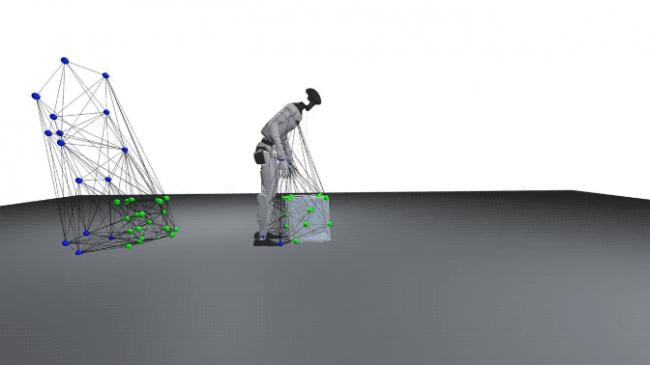
在研究中,交互网格被定义为一个体积结构,用于保持身体部位、物体与环境之间的空间关系。
交互网格的顶点由关键的机器人或人类关节以及从物体和环境中采样的点组成。
通过收缩或拉伸该网格,研究可以在保持相对空间结构和接触关系的前提下,将人类动作映射到机器人上。
在交互网格的构建过程中,研究人员对用户定义的关键关节位置以及随机采样的物体和环境点应用德劳内四面体化(Delaunay tetrahedralization)。
(注:为了更精确地保持接触关系,物体和环境表面的采样密度高于身体关节的采样密度。)
研究通过最小化源动作(人类示范关键点及对象/环境采样点)与目标动作(机器人对应关键点及相同对象/环境点)之间的拉普拉斯形变能(Laplacian deformation energy),让机器人动作尽量保持与人类示范一致的空间和接触关系。
拉普拉斯坐标衡量每个关键点与其邻居点之间的相对关系,从而在重定向动作时保留局部空间结构和接触关系。
在每个时间帧,算法通过求解约束非凸优化问题来获得机器人配置,包括浮动底座的姿态和平移以及所有关节角度,同时满足碰撞避免、关节和速度限制,以及防止支撑脚滑动等硬约束。
优化则使用顺序二次规划风格的迭代方法,每帧以上一帧的最优解作为初值,以保证时间上的连续性和平滑性。
由此,基于交互网格的方法可适配不同机器人形态和多种交互类型,只需调整交互网格中的关键点对应关系和碰撞模型。

[加西网正招聘多名全职sales 待遇优]
好新闻没人评论怎么行,我来说几句
首先,OmniRetarget通过基于交互网格(interaction-mesh)的约束优化,将人类示范动作映射到机器人上。
在研究中,交互网格被定义为一个体积结构,用于保持身体部位、物体与环境之间的空间关系。
交互网格的顶点由关键的机器人或人类关节以及从物体和环境中采样的点组成。
通过收缩或拉伸该网格,研究可以在保持相对空间结构和接触关系的前提下,将人类动作映射到机器人上。
在交互网格的构建过程中,研究人员对用户定义的关键关节位置以及随机采样的物体和环境点应用德劳内四面体化(Delaunay tetrahedralization)。
(注:为了更精确地保持接触关系,物体和环境表面的采样密度高于身体关节的采样密度。)
研究通过最小化源动作(人类示范关键点及对象/环境采样点)与目标动作(机器人对应关键点及相同对象/环境点)之间的拉普拉斯形变能(Laplacian deformation energy),让机器人动作尽量保持与人类示范一致的空间和接触关系。
拉普拉斯坐标衡量每个关键点与其邻居点之间的相对关系,从而在重定向动作时保留局部空间结构和接触关系。
在每个时间帧,算法通过求解约束非凸优化问题来获得机器人配置,包括浮动底座的姿态和平移以及所有关节角度,同时满足碰撞避免、关节和速度限制,以及防止支撑脚滑动等硬约束。
优化则使用顺序二次规划风格的迭代方法,每帧以上一帧的最优解作为初值,以保证时间上的连续性和平滑性。
由此,基于交互网格的方法可适配不同机器人形态和多种交互类型,只需调整交互网格中的关键点对应关系和碰撞模型。
[加西网正招聘多名全职sales 待遇优]
| 分享: |
| 注: | 在此页阅读全文 |
推荐: