
新闻  揭秘人形机器人训练营:24小时端茶、煎蛋、拖地…
揭秘人形机器人训练营:24小时端茶、煎蛋、拖地…
揭秘人形机器人训练营:24小时端茶、煎蛋、拖地…
本照片由一条编辑部使用AI生成
机器人进家的最大难点在于什么?
市面上,一些人形机器人的“下半身”发育已经相对成熟,可以跑跳、爬坡、扎马步,音乐响起,还能来段广场舞、做后空翻。但这些任务,更像是逢年过节拉家里的小朋友展示才艺,离真正的日常应用还有十万八千里。
“上半身”,才是进家干活的关键。姚卯青拆解了上半身操作的两个难点:对动作的精度要求很高、和物体有复杂的交互。“像做饭、倒水、端茶、开门,有千百种的操作种类,而且上半身的轨迹会非常复杂。而下半身,和物体没有复杂交互,无外乎就是迈步子这样一种形态。”
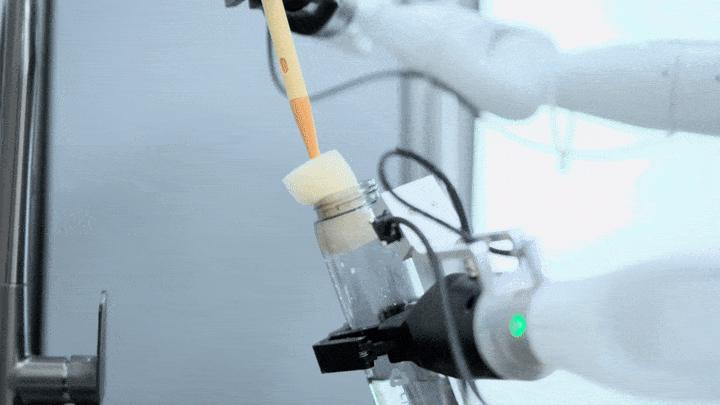
机器人手部的柔韧性、灵活性比起人类还相距甚
远
很多动作,对人类轻而易举,但对机器人来说却难如登天。“比如插USB这个小动作,它对动作的精度要求非常高,二是没法只依赖视觉的输入就去判断是否成功”,姚卯青解释,人在插USB、充电器的时候,经常要反复尝试,机器人同样,“它还需要很多力矩的反馈来去实现这种闭环控制。”
再比如简单的揉面团、切菜,也对机器人手部的灵活和柔韧性提出了极高的要求。手是人体关节最集中、感觉最集中的区域之一,也是人形机器人最难模拟的部位。“很多机器人只有一个两指的夹爪,只能像一双筷子一样去夹取东西。”

德国协作机器人公司NEURA 的“灵巧手”
目前有一些机器人已经拥有了灵巧手,但它的自由度跟人的手还是相差甚远。“人的手应该有20多个自由度,现在市面上量产的机械手很多只有6、7个。”
成本也是大问题,在手上每增加一个自由度,就要加多加塞一套电机、编码器和传动装置,一双“像人的手”往往价格不菲,可高达10万元一只。此外,灵巧手很重,“现在一只手可能要一公斤多,怎么才能把它做到小型化、轻量化,这个也比较难。”
近一年来,社交媒体上陆续出现了“养老人形机器人”的风声,但姚卯青认为,这些产品大多都还停留在概念阶段。

[加西网正招聘多名全职sales 待遇优]
无评论不新闻,发表一下您的意见吧
机器人进家的最大难点在于什么?
市面上,一些人形机器人的“下半身”发育已经相对成熟,可以跑跳、爬坡、扎马步,音乐响起,还能来段广场舞、做后空翻。但这些任务,更像是逢年过节拉家里的小朋友展示才艺,离真正的日常应用还有十万八千里。
“上半身”,才是进家干活的关键。姚卯青拆解了上半身操作的两个难点:对动作的精度要求很高、和物体有复杂的交互。“像做饭、倒水、端茶、开门,有千百种的操作种类,而且上半身的轨迹会非常复杂。而下半身,和物体没有复杂交互,无外乎就是迈步子这样一种形态。”
机器人手部的柔韧性、灵活性比起人类还相距甚
远
很多动作,对人类轻而易举,但对机器人来说却难如登天。“比如插USB这个小动作,它对动作的精度要求非常高,二是没法只依赖视觉的输入就去判断是否成功”,姚卯青解释,人在插USB、充电器的时候,经常要反复尝试,机器人同样,“它还需要很多力矩的反馈来去实现这种闭环控制。”
再比如简单的揉面团、切菜,也对机器人手部的灵活和柔韧性提出了极高的要求。手是人体关节最集中、感觉最集中的区域之一,也是人形机器人最难模拟的部位。“很多机器人只有一个两指的夹爪,只能像一双筷子一样去夹取东西。”
德国协作机器人公司NEURA 的“灵巧手”
目前有一些机器人已经拥有了灵巧手,但它的自由度跟人的手还是相差甚远。“人的手应该有20多个自由度,现在市面上量产的机械手很多只有6、7个。”
成本也是大问题,在手上每增加一个自由度,就要加多加塞一套电机、编码器和传动装置,一双“像人的手”往往价格不菲,可高达10万元一只。此外,灵巧手很重,“现在一只手可能要一公斤多,怎么才能把它做到小型化、轻量化,这个也比较难。”
近一年来,社交媒体上陆续出现了“养老人形机器人”的风声,但姚卯青认为,这些产品大多都还停留在概念阶段。
[加西网正招聘多名全职sales 待遇优]
| 分享: |
| 注: | 在此页阅读全文 |
推荐: